

En este nuevo artículo voy a hablar del transistor bipolar también conocido como transistor BJT y de los dos tipos que existen: transistor NPN y transistor PNP.
Los transistores tienen dos funciones principales: amplificar y conmutar.
En este artículo no sólo vas a conocer la teoría que se esconde detrás de un transistor bipolar, también aprenderás cómo puedes elegir el más adecuado para tu proyecto.
También puedes ver el artículo de transistor MOSFET con Arduino y ESP8266 si te interesan este otro tipo de transistores.
Y como la teoría no sirve de nada si no la pones en práctica, al final del artículo hay ejemplo práctico donde aprenderás a controlar un ventilador de un ordenador desde un Arduino gracias a un transistor NPN.
Ponte como que empezamos con el tutorial del transistor bipolar.

Indice de contenidos
¿Qué es un transistor?


A modo de concepto podemos decir que:
Un transistor es un dispositivo electrónico de tres terminales utilizado para generar una señal de salida como respuesta a una señal de entrada.
Esto ha sonado un poco a charlatán de crecepelo y puede ser una definición de una caja negra donde hay una salida que depende de una entrada. Dice mucho pero a la vez no dice nada así que voy a concretar.
De los tres terminales que posee un transistor:
- Uno es la entrada de corriente.
- Otro es la salida de corriente.
- Y el tercero es el terminal de control.
De modo general: al aplicar una pequeña señal en el terminal de control (base) es posible manipular una corriente considerable que fluye desde la entrada a la salida.
Un grifo de agua es un ejemplo típico para comprender el funcionamiento de un transistor.


En este caso la entrada y salida de agua serían los pines de entrada y salida de corriente; mientras la válvula permite controlar el flujo del agua de la misma forma que el terminal de control puede controlar la corriente.
Entre las funciones más comunes de los transistores se encuentran las de amplificador, oscilador, conmutador y rectificador.
En este artículo me voy a centrar en las características del transistor cuando funciona como conmutador.
Gracias a esta función, un transistor puede controlar grandes cargas utilizando una placa de Arduino por ejemplo.
Da lo mismo si es un Arduino MEGA, un Arduino UNO o un Arduino Nano.

En la imagen de arriba te muestro varios ejemplos de transistores. Como puedes ver los encapsulados son variados, esto se debe principalmente a la potencia que sean capaces de manejar.
El tipo transistor del que voy a hablar en este artículo es el transistor bipolar también conocido como transistor BJT (son las siglas en inglés Bipolar Junction Transistor).
La denominación de bipolar es debido a que la conducción tiene lugar gracias al desplazamiento de portadores de dos polaridades, los huecos con polaridad positiva y los electrones con polaridad negativa.
Principio de funcionamiento del transistor bipolar o transistor BJT
La estructura interna de un transistor bipolar es realmente compleja, por lo tanto, en lugar de darte toda una charla teórica voy a ser prácticos.
Me voy a centrar en lo básico para que comprendas su funcionamiento y seas capaz de utilizar un transistor como interruptor, pero sin grandes complicaciones.
De todos modos, si eres de los más curiosos y quieres ampliar tus conocimientos al respecto, aquí te dejo un vídeo donde se explica y muestra en detalle el funcionamiento de los transistores de unión bipolar.

Un transistor cuenta con 3 terminales. En el caso del transistor BJT estos terminales son: emisor, colector y base.
Existen dos tipos de transistores bipolares: transistor NPN y transistor PNP.
Ambos son similares, aunque no exactamente iguales.


Las funciones de los pines son las siguientes:
- Emisor: salida de corriente (entrada de corriente en PNP)
- Colector: entrada de corriente (salida de corriente en PNP)
- Base: pin de control
En ambos casos (transistor PNP y transistor NPN) el pin base es utilizado para controlar la corriente que fluye entre emisor y colector.
De momento lo único con lo que quiero que te quedes es que hay dos tipos de transistores bipolares: transistor NPN y transistor PNP.
En este artículo me centraré en hablar del transistor NPN ya que son los más interesantes para utilizar con Arduino y en concreto, para utilizar como conmutadores.
No te preocupes si ahora mismo no se te ocurre ningún caso donde se puede utilizar un transistor NPN como conmutador, muy pronto veremos un ejemplo.
Transistor NPN: modos de operación
Los transistores bipolares tienen tres modos de operación bien definidos:
- Corte: en este modo no fluye corriente entre el emisor y el colector. Por lo tanto, se considera que estos terminales están desconectados entre sí. (Este estado es equivalente al de un interruptor abierto).
- Activo: en este modo la intensidad de la corriente entre el colector y el emisor es proporcional a la señal de control aplicada a la base.
- Saturación: en este modo entre los terminales colector y emisor fluye la máxima corriente posible. Por eso se considera como si los terminales de colector y emisor estuvieran cortocircuitados.
El modo activo es utilizado, principalmente, para amplificar señales analógicas. El caso más conocido es el de los amplificadores de audio (aunque no es el único).
Si bien es un tema muy interesante, en este artículo no hablaré del modo activo de un transistor bipolar.
Los modos de corte y saturación imitan el comportamiento de un interruptor mecánico (como el que utilizas para encender y apagar la luz de una habitación). Es por esto que estos modos son empleados usualmente para utilizar el transistor como un interruptor controlado eléctricamente.
El modo de operación del transistor BJT es determinado por la corriente que se aplica a la base. Esa es la razón por la cual es clasificado como un dispositivo controlado por corriente.
Para comprender el funcionamiento del transistor bipolar te propongo estudiar una analogía hidráulica que expresa a la perfección su operación.
En las siguientes figuras se muestran dos canales relacionados de forma tal que el canal más débil (lateral) controla el caudal del canal principal. En una situación como esta se presentan 3 casos:
- Si el canal lateral no recibe agua, el canal principal no se abre. (Este es el modo de corte)


- En caso de que se aplique un caudal de agua moderado al canal lateral, la compuerta principal se abriría un poco provocando un flujo de agua mayor. (Este es el modo activo)


- Si se aumenta aún más el caudal del canal lateral, la compuerta principal se abrirá totalmente permitiendo pasar toda el agua posible. Es importante notar que cuando se alcanza este punto, aunque el caudal del canal lateral aumente el principal seguirá ofreciendo la misma cantidad de agua. (Este es el modo de saturación)

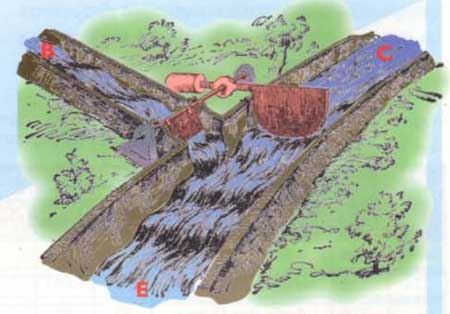
Ese es precisamente el comportamiento de un transistor bipolar o transistor BJT, donde la entrada pequeña es la base, la entrada grande es el colector y la salida es el emisor.


Es importante notar que tanto la corriente de colector como la de base salen por el emisor. Esto sucede en el transistor NPN ya que en el transistor PNP la corriente sale por el colector.
Ganancia de corriente directa de un transistor bipolar
La relación de corrientes entre ambas entradas (colector y base) es conocida como la ganancia de corriente directa, usualmente denotada como hFE o β (beta) y se expresa como:


Esto significa que la corriente por el colector será igual a la corriente de base multiplicada por hFE.
Para que te hagas una idea: los valores de hFE comunes se encuentran en el rango de 80 a 200. Esto nos indica que con una corriente de 20 mA puedes controlar una carga de 1A, por poner un ejemplo.
Para conocer el valor de hFE para un transistor NPN en particular es necesario revisar su hoja de características técnicas o datasheet.
Configuración de emisor común transistor NPN bipolar
Una de las configuraciones más prácticas para utilizar un transistor bipolar como interruptor es la de emisor común.


En la imagen puedes ver la configuración para un tipo de transistor NPN:
- La base del transistor se encuentra conectada a un pin digital del Arduino mediante la resistencia Rb.
- La carga (RL) se encuentra conectada entre el colector y la fuente de voltaje externo.
- Por último, el emisor está conectado a tierra.
Si pones el pin digital conectado a la base en estado alto (HIGH) la corriente fluirá del pin a la base del transistor NPN. Es algo obvio ¿no?
Si dicha corriente es lo suficientemente grande el transistor entrará en modo de saturación. Esto quiere decir que los terminales colector y emisor actúan como un cortocircuito.
Eso significa que ahora el colector del transistor NPN está (idealmente hablando) conectado a tierra. Por lo tanto, la carga RL (que puede ser un motor, bombilla o lo que sea) está encendida.
Si el pin es puesto en estado bajo (LOW) no se genera corriente de base y, por tanto, el transistor entra en modo de corte. Emisor y colector se comportan como un circuito abierto y por lo tanto el dispositivo conectado está apagado.
Esta sería la teoría pero para ponerlo en práctica, es necesario conocer qué valores son los más idóneos para la resistencia Rb. Esto es lo que veremos a continuación.
Cálculo de Rb en configuración emisor común con transistor NPN
La resistencia de base (Rb) es la encargada de controlar la corriente de base y por lo tanto, nos permite controlar el modo de funcionamiento del transistor NPN o transistor bipolar.
Para calcular la resistencia de base (Rb) se utiliza la siguiente fórmula:


El valor de VPIN es el voltaje en el pin digital del Arduino que se utiliza para controlar el transistor. Como está conectado a un Arduino o a un ESP8266, puede ser o 5V o 3.3V. Depende del microcontrolador con el que estés trabajando.
El término 0,7 de la ecuación anterior es una corrección en el voltaje. Normalmente la corriente de base genera una caída de tensión entre base y emisor. Dicha caída de tensión puede variar, pero por lo general es muy cercana a 0,7 V y se puede aproximar como tal.
En las hojas de características técnicas, el voltaje base-emisor en saturación lo encontrarás con las siglas VBE (SAT).
De la expresión anterior se deduce que un mayor valor de RB provoca una menor corriente de base.
Con esta teoría es más que suficiente para empezar a trabajar con un transistor bipolar o transistor NPN. Pero antes, es importante conocer las características de un transistor bipolar y de dónde sacarlas.
Principales características de un transistor bipolar
Lo primero que tienes que hacer con un transistor bipolar es buscar su hoja de características técnicas. Esto es sencillo si sabes como se llama. Normalmente viene escrito sobre el propio encapsulado.


Eso sí, para poder ver el nombre debes tener buena vista, utilizar gafas o utilizar algún tipo de lupa o microscopio. Yo por ejemplo utilizo el zoom del teléfono móvil.
Algunos ejemplos de transistor bipolar populares son el 2N3055 (transistor NPN) o el BD178 (transistor PNP).
Encapsulado y pines de un transistor bipolar
Lo primero que encontramos en la hoja de datos de un transistor bipolar son las imágenes que permiten identificar los pines y el encapsulado del transistor.
Normalmente el fabricante ofrece dos imágenes, una con el símbolo y otra con el componente. Ambas imágenes tienen sus pines numerados para identificarlos.
Por el ejemplo, en la hoja de características técnicas del transistor NPN 2N2222 encontramos estas dos imágenes.


Los pines corresponden a:
- Colector
- Base
- Emisor
Es importante identificar los tres pines del transistor bipolar (colector, base y emisor).
Voltajes y corrientes máximas de un transistor bipolar
La siguientes características importantes que tienes que mirar son los valores máximo de voltaje y corriente que admite el transistor bipolar.

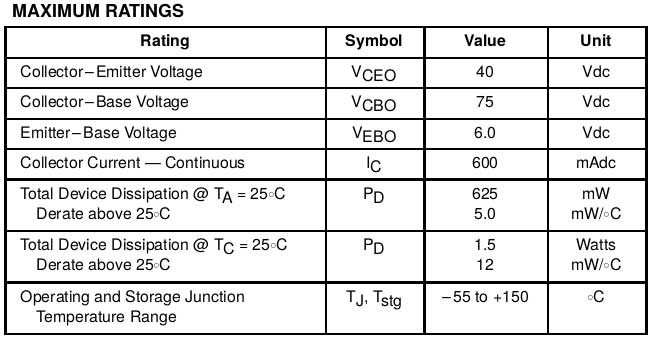
Para utilizar un transistor como un interruptor hay que fijarse en los valores de:
- Voltaje colector-emisor máximo (VCEO)
- Corriente de colector máxima (ICO)
En el caso del 2N2222 tiene un VCEO de 40V. Eso significa que este dispositivo no puede ser utilizado para controlar cargas que requieran un voltaje de alimentación mayor a 40V.
Por otro lado ICO tiene un valor de 600 mA, indicando que no es posible utilizarlo para controlar un dispositivo de mayor consumo.
Ojo con utilizar un transistor NPN o PNP con un voltaje o corriente que superen estos máximo, podemos estropear el transistor o el circuito donde esté conectado.
Ganancia de corriente directa (hFE)
La ganancia de corriente directa (hFE) de un transistor bipolar es la relación entre la corriente de colector Ic y la corriente de base Ib.
Esta ganancia varía mucho de un modelo a otro. Es usual que dos transistores del mismo tipo no tengan la misma ganancia. Inclusive esta ganancia puede variar de forma activa con la propia corriente de colector.
Es por eso que los fabricantes se limitan a darnos los valores máximos y mínimos entre los que se garantiza se encuentra el valor de hFE.
En la hoja de características técnicas del 2n2222 se ofrecen varios valores de hFE para distintas condiciones de funcionamiento.


En la hoja de datos del 2SD882 también se puede apreciar como la hFE puede variar con respecto a la corriente de colector en un rango bastante amplio.


Y tras ver las características más importantes de un transistor bipolar, vamos a ponerlo en práctica con un ejemplo utilizando un motor y un Arduino.
Ejemplo control de motor DC con transistor BJT y Arduino
El siguiente ejercicio lo que pretende es poner en práctica todo lo que hemos estado viendo del transistor bipolar y del transistor NPN.
En este ejemplo te muestro cómo controlar un motor DC desde el ordenador empleando un Arduino Nano y un transistor bipolar como interfaz de potencia.
Comencemos…
Circuito transistor bipolar
En la siguiente figura te muestro el esquema del circuito necesario.

Como puedes observar es una configuración similar a la que analizamos anteriormente salvo por el diodo en paralelo con el motor.
Hay una resistencia de base (Rb) una carga (el motor) y un transistor NPN.
El diodo es para proteger el transistor bipolar. Es recomendable utilizarlo siempre que la carga posea elementos inductivos como los motores o relés. Si no utilizas el diodo, corres el riesgo de dañar el transistor e incluso el propio Arduino.
Esto se debe a que los elementos inductivos ante las conmutaciones provocan picos de voltajes que pueden dañar a otros componentes. Un diodo colocado en paralelo con la carga es capaz de eliminar esos picos.
En este esquema existen dos grandes incógnitas:
- ¿Qué transistor utilizo?
- ¿Qué valor de resistencia de base necesito?
De esto hablaremos más adelante pero antes, déjame que te diga cómo puedes caracterizar un motor DC.
Caracterizar el motor DC
Para responder esas dos preguntas lo primero es encontrar las características del motor. Eso significa que necesitamos conocer su voltaje y corriente de operación.
Para este ejemplo voy a emplear algo muy común que seguro tienes por casa, un ventilador de ordenador de 12V y 0.18A. En este caso el ventilador trae una etiqueta con las características.


En otros casos los motores no traen las especificaciones, ya sea porque perdieron las etiquetas o porque nunca las tuvieron.


En la figura se muestra un motor de DC que opera a 5 voltios (lo sé porque lo obtuve de un equipo que funcionaba a ese voltaje) pero no hay información sobre su consumo.
Para conocer la corriente que realmente consume el motor lo conectamos a una fuente de alimentación con un amperímetro en serie. También puedes utilizar un multímetro en modo medición de corriente.


En la medición que realicé obtuve un valor de corriente de 0,29 A. Aproximadamente 300 mA.


Si realizamos el mismo experimento para el ventilador de ordenador se obtiene una medición de 0,14A que es un valor muy cercano al especificado en su etiqueta.


En caso de que no poseas un instrumento de medición puedes asumir (para motores pequeños como estos) que la corriente será menor de 0,4 A.
Selección del transistor bipolar correcto
Debes seleccionar un transistor bipolar o mejor dicho, transistor NPN cuyo voltaje colector-emisor máximo sea mayor al voltaje del motor. También la corriente de colector máxima tiene que ser mayor a la requerida por el motor.
Para el ventilador necesitaríamos un transistor bipolar con:
- VCE0 > 12V
- IC > 0,18 A
Y para el motor uno con:
- VCE0 > 5V
- IC > 0,3 A
El 2n2222 es un buen ejemplo de transistor NPN para estos casos. Anteriormente habíamos revisado su hoja de datos:
- VCE0 = 40 V (valor máximo)
- IC = 600 mA (valor máximo)
Aunque he seleccionado un 2n2222 porque lo tengo a mano, eso no significa que no existan otros. Aquí te dejo una lista de algunos transistores que cumplen con estos requerimientos:
Si no tienes transistores por casa puedes sacar unos cuantos de aparatos y dispositivos eléctricos viejos. También puedes comprar una caja con un kit de diferentes modelos de transistor bipolar.
Calcular la corriente de base
Ahora que hemos elegido el transistor bipolar, es necesario calcular la corriente que necesitamos inyectarle a la base obteniendo la ganancia de corriente directa (hFE) del transistor.
En la hoja de características técnicas encontramos varios valores de hFE para distintas condiciones de operación del 2n2222.


Como la idea es asegurar que el transistor entre en saturación tomamos un valor de hFE próximo al mínimo. En este caso he decidido trabajar con hFE = 40.
Con estos datos podemos calcular la corriente de base necesaria, en este caso para el ventilador se obtiene:




Esto significa que con solo 4,5 mA podemos controlar una carga de casi 200 mA que funciona con 12 voltios.
Calcular resistencia de base
Para garantizar una corriente de base de 4,5 mA es necesario colocar una resistencia de base adecuada pero ¿cuál debería ser su valor?
Con la siguiente fórmula la puedes calcular fácilmente:


Por supuesto, el valor obtenido no es directamente válido ya que es posible que no exista una resistencia con ese valor en específico. En esos casos es necesario utilizar un valor cercano al obtenido.
Para este ejemplo he tomado una resistencia de 1kΩ que es un valor muy común y la gran mayoría de los kits de Arduino los incluyen.
Montaje del circuito
Una vez calculados todos los valores es hora de montar el circuito.
En el siguiente esquema eléctrico puedes ver el circuito que vamos a utilizar hecho con el software de diseño electrónico Fritzing.


En la siguiente imagen se muestra el montaje en placa de prototipos utilizando un Arduino Nano y el ventilador.

Código para controlar un motor con un transistor bipolar y un Arduino
El sketch implementado permite encender o apagar el ventilador desde el ordenador utilizando el monitor serie. Para encender al motor es necesario enviar el carácter «+» y para apagarlo se envía un carácter «-«.
Se necesita una constante (MOTOR) para almacenar el pin digital a utilizar para accionar el motor.
#define MOTOR 4En la función setup se inicializa el monitor serie a 9600 baudios y se configura el pin de control del motor como salida digital.
void setup() {
// configurar puerto serial a 9600
Serial.begin(9600);
// configurar pin como salida
pinMode(MOTOR, OUTPUT);
digitalWrite(MOTOR, LOW);
}En la función loop se comprueba si se ha recibido algún carácter desde el monitor serie.
if( Serial.available() )En caso de que exista algún carácter este es leído. En dependencia del carácter recibido el motor será encendido o apagado.
char c = Serial.read();
if( c == '+' ){
digitalWrite(MOTOR, HIGH);
}
else if( c == '-' ){
digitalWrite(MOTOR, LOW);
}A continuación, te dejo el código completo.
#define MOTOR 4
void setup() {
// configurar puerto serial a 9600
Serial.begin(9600);
// configurar pin como salida
pinMode(MOTOR, OUTPUT);
digitalWrite(MOTOR, LOW);
}
void loop() {
if( Serial.available() ){
char c = Serial.read();
if( c == '+' ){
digitalWrite(MOTOR, HIGH);
}
else if( c == '-' ){
digitalWrite(MOTOR, LOW);
}
}
}Conclusiones
En este artículo has podido ver cómo funciona, en la práctica, un transistor bipolar o transistor BJT. Existen dos tipos de transistores bipolares:
- Transistor NPN
- Transistor PNP
Los más sencillos de usar con Arduino son los transistores NPN.
Puede realizar varias funciones pero la que más nos interesa a nosotros, los que trabajamos con Arduino, es como conmutador.
Gracias a Shutterstock por ceder los derechos de algunas imágenes de este artículo.